tl;dr
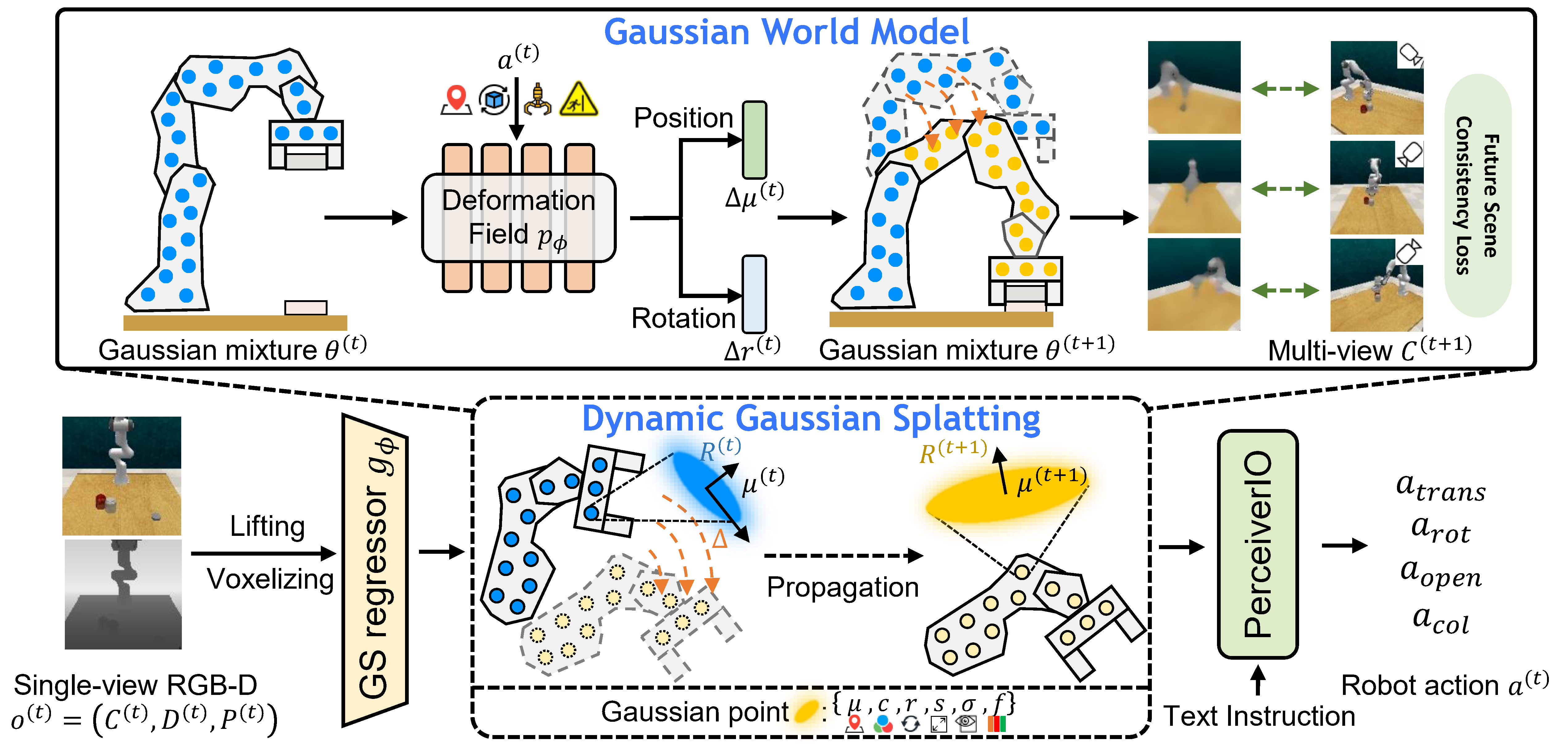
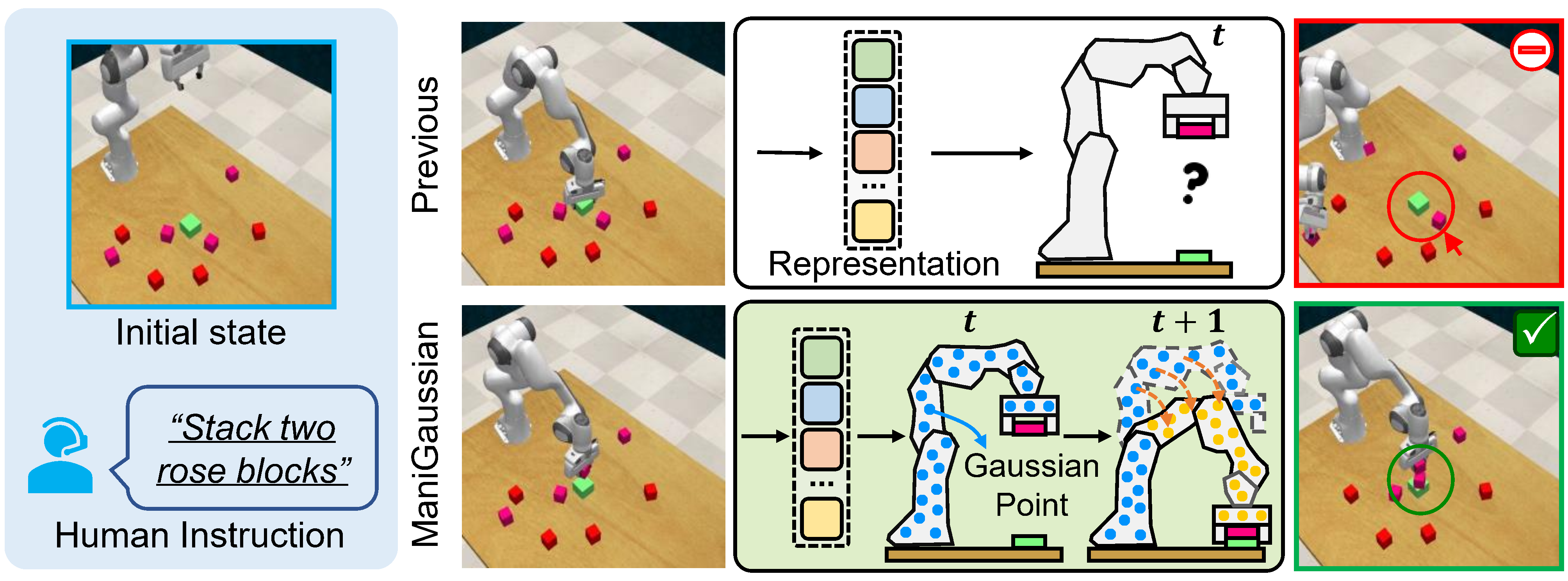
- We propose a dynamic Gaussian Splatting framework to learn the scene-level spatiotemporal dynamics in general robotic manipulation tasks, so that the robotic agent can complete human instructions with accurate action prediction in unstructured environments.
- We build a Gaussian world model to parameterize distributions in our dynamic Gaussian Splatting framework, which can provide informative supervision to learn scene dynamics from the interactive environment.
- We conduct extensive experiments of 10 tasks on RLBench, and the results demonstrate that our method achieves a higher success rate than the state-of-the-art methods with less computation.